- A+
所属分类:机电一体化
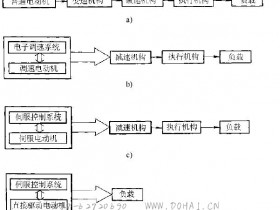
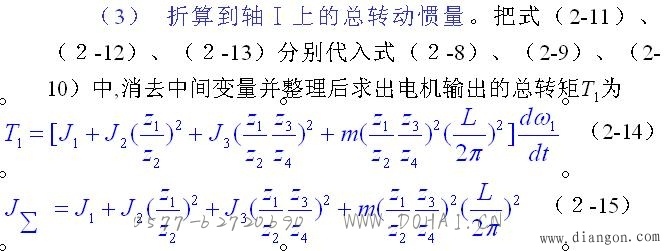
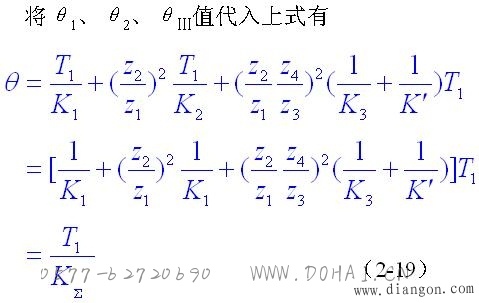
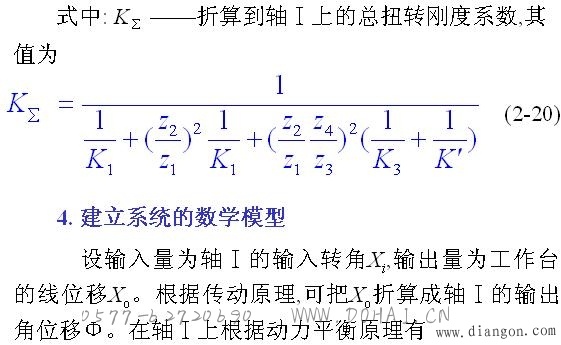
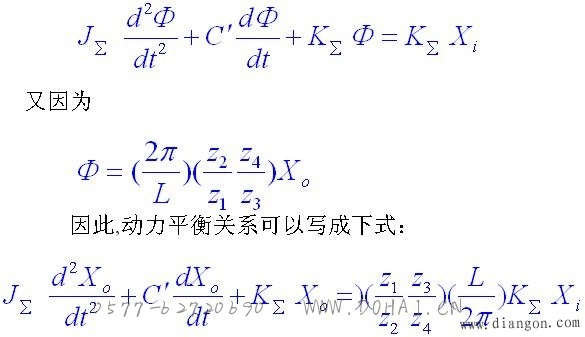
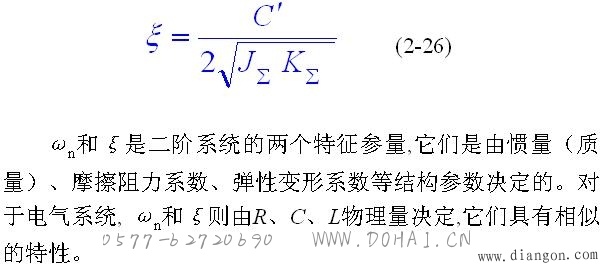
在图2-11所示的数控机床进给传动系统中, 设J1为轴Ⅰ部件和电动机转子构成的转动惯量;J2、J3为轴Ⅱ、Ⅲ部件构成的转动惯量; K1、K2、K3分别为轴Ⅰ、Ⅱ、Ⅲ的扭转刚度系数; K为丝杠螺母副及螺母底座部分的轴向刚度系数; m为工作台质量; C为工作台导轨粘性阻尼系数; T1、T2、T3分别为轴Ⅰ、Ⅱ、Ⅲ的输入转矩。
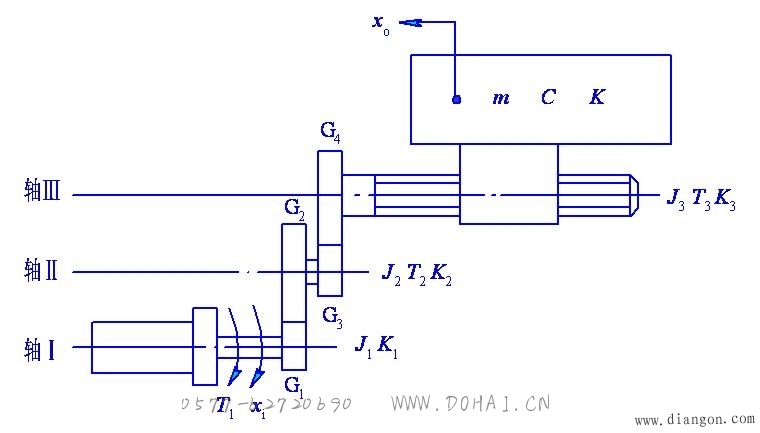
图2-11 数控机床进给系统
1. 转动惯量的折算
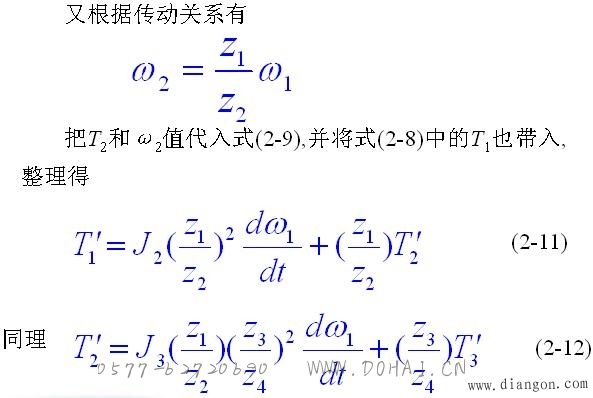
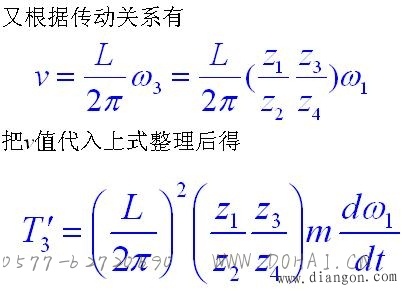
把轴Ⅰ、Ⅱ、Ⅲ上的转动惯量和工作台的质量都折算到轴Ⅰ上,作为系统的等效转动惯量。设T′1、 T′2、 T′3分别为轴Ⅰ、Ⅱ、Ⅲ的负载转矩, ω1、ω2、ω3分别为轴Ⅰ、Ⅱ、Ⅲ的角速度,v为工作台位移时的线速度,z1, z2, z3, z4分别为四个齿轮的齿数。
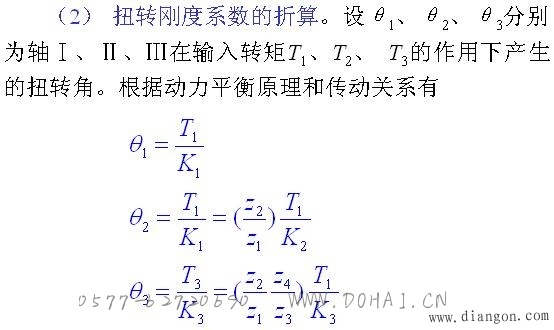
(1) Ⅰ、Ⅱ、Ⅲ轴转动惯量的折算。 根据动力平衡原理,Ⅰ、Ⅱ、Ⅲ轴的力平衡方程分别是

2. 粘性阻尼系数的折算
当工作台匀速转动时,轴Ⅲ的驱动转矩T3完全用来克服粘滞阻尼力的消耗。考虑到其他各环节的摩擦损失比工作台导轨的摩擦损失小得多,故只计工作台导轨的粘性阻尼系数C。
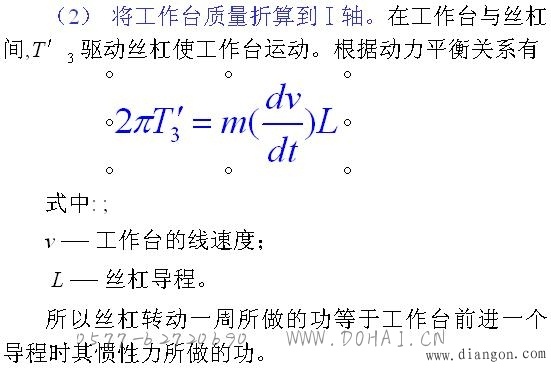
根据工作台与丝杠之间的动力平衡关系有
T32π=CvL

3. 弹性变形系数的折算
(1) 轴向刚度的折算。 当系统承担负载后,丝杠螺母副和螺母座都会产生轴向弹性变形,图2-12是它的等效作用图。在丝杠左端输入转矩T3的作用下,丝杠和工作台之间的弹性变形为δ,对应的丝杠附加扭转角为Δθ3。根据动力平衡原理和传动关系,在丝杠轴Ⅲ上有:
2πT3=KδL
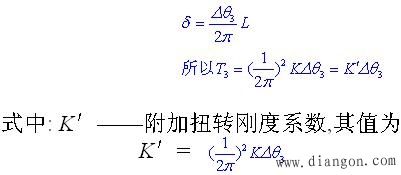
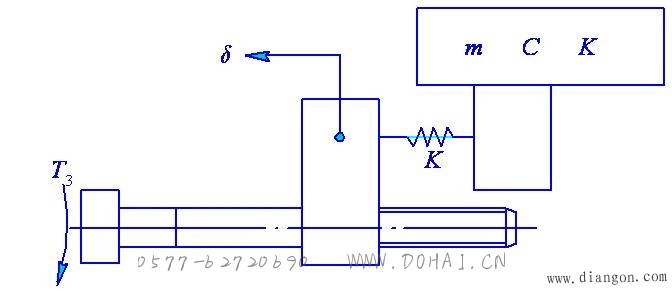
图2-12 弹性变形的等效图


- 营销微信
- 报单询价扫一扫
-

- 技术微信
- 技术问题扫一扫
-