- A+
所属分类:机电一体化
光栅由标尺光栅和指示光栅组成,两者的光刻密度相同,但体长相差很多,其结构如图1所示。
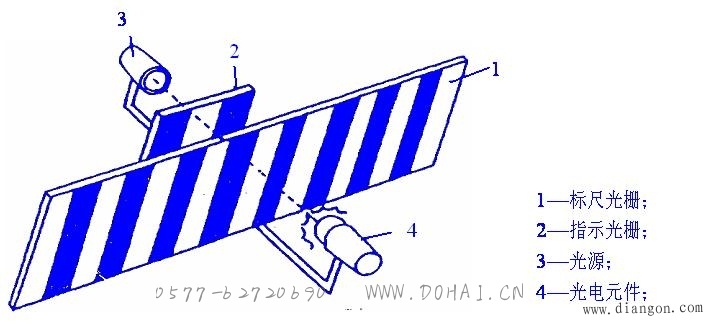
图1 光栅测量原理
指示光栅上出现莫尔条纹,它们是沿着与光栅条纹几乎成垂直的方向排列的,如图2所示。
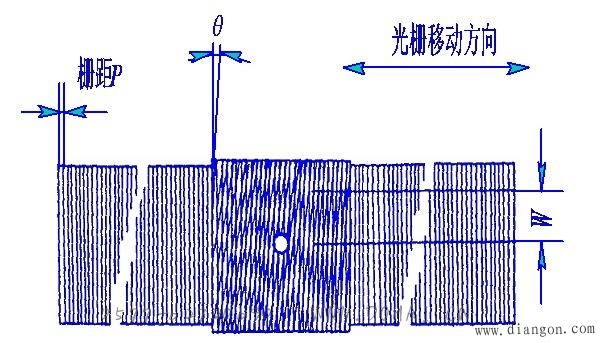
图2 莫尔条纹示意
图2 莫尔条纹示意
光栅莫尔条纹的特点是起放大作用,用W表示条纹宽度,P表示栅距,θ表示光栅条纹间的夹角,则有
光栅测量系统的基本构成如图3所示。
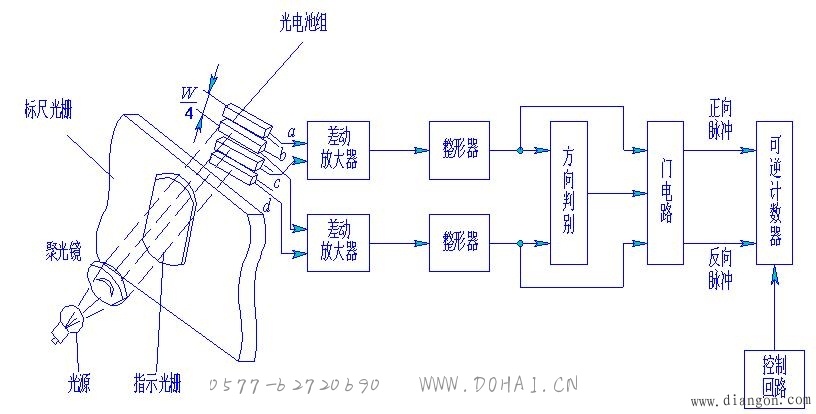
图3 光栅测量系统
1.感应同步器
(1)直线感应同步器
由定尺和滑尺两部分组成。
滑尺表面刻有两个绕组,即正弦绕组和余弦绕组,见图4。
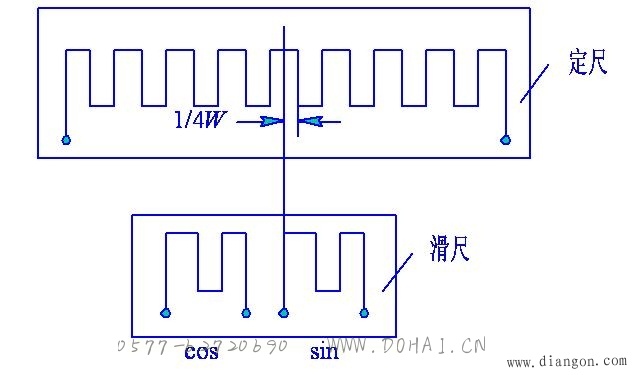
图4 感应同步器原理图
(2)圆盘式感应同步器
如图5所示,其转子相当于直线感应同步器的滑尺,定子相当于定尺,而且定子绕组中的两个绕组也错开1/4节距。
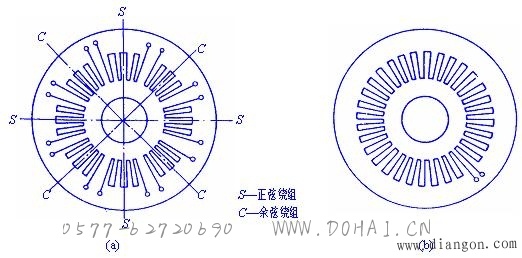
图5 圆盘式感应同步器
(a) 定子; (b) 转子
感应同步器根据其激磁绕组供电电压形式不同,分为鉴相测量方式和鉴幅测量方式。
(1) 鉴相式
根据感应电势的相位来鉴别位移量。
图6说明了感应电势幅值与定尺和滑尺相对位置的关系。

图6 滑尺绕组位置与定尺感应电势幅值的变化关系
图6 滑尺绕组位置与定尺感应电势幅值的变化关系
滑尺在定尺上每滑动一个节距,定尺绕组感应电势就变化了一个周期,即
eA=Ku–Acosθ(4-11)
式中: ;
K——滑尺和定尺的电磁耦合系数;
θ——滑尺和定尺相对位移的折算角。
若绕组的节距为W,相对位移为l,则

同样,当仅对正弦绕组B施加交流激磁电压UB时,定尺绕组感应电势为

(2)鉴幅式
同样,当仅对正弦绕组B施加交流激磁电压UB时,定尺绕组感应电势为
e B=-Ku B sinθ (4-13)
对滑尺上两个绕组同时加激磁电压,则定尺绕组上所感应的总电势为
e =e A+eB=Ku Acosθ-KuBsinθ
=KUmsinωt cosω-KU mcosωtsinω
=KUmsin (ωt-θ) (4-14)
从上式可以看出,感应同步器把滑尺相对定尺的位移l的变化转成感应电势相角θ的变化。因此,只要测得相角θ,就可以知道滑尺的相对位移l:
(2)鉴幅式
在滑尺的两个绕组上施加频率和相位均相同,但幅值不同的交流激磁电压uA和uB。
uA=Umsinθ-1sinωt (4-16)
uB=Umcosθ -1 sinωt (4-17)
式中: θ1——指令位移角。
设此时滑尺绕组与定尺绕组的相对位移角为θ,则定尺绕组上的感应电势为
e =KuA cosθ-KuBsinθ=KUm(sinθ -1 cosθ-cosθ-1sinθ)sinωt=KUmsin (θ1-θ) sinωt (4-18)
- 营销微信
- 报单询价扫一扫
-

- 技术微信
- 技术问题扫一扫
-