- A+
一、选择性流程及其编程
(一)选择性流程程序的特点
选择性流程程序:由两个及以上的分支程序组成的,但只能从中选择一个分支执行的程序,称为选择性流程程序。
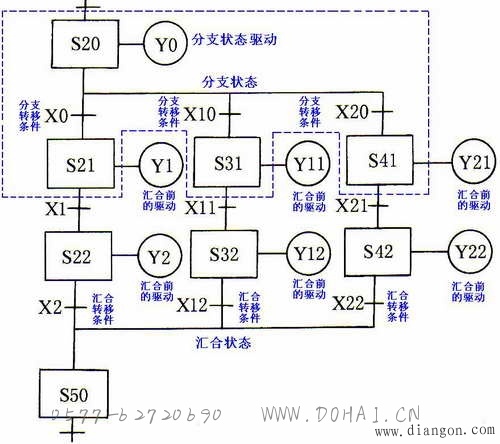
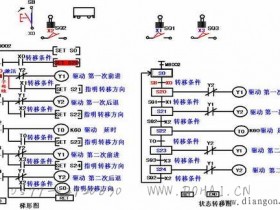
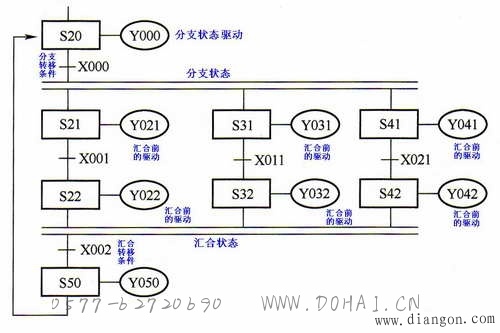
选择性流程程序的结构形式
1.从3个流程中选择执行哪一个流程由转移条件X0、X10、X20决定;
2.分支转移条件X0、X10、X20不能同时接通,哪个接通,就执行哪条分支;
3.当S20已动作,一旦X0接通,程序就向S21转移,则S20就复位。因此,即使以后X10或X20接通,S31或S41也不会动作;
4.汇合状态S50,可由S22、S32、S42中任意一个驱动。
(二)选择性流程编程
选择性流程编程原则:先集中处理分支状态,然后再集中处理汇合状态。
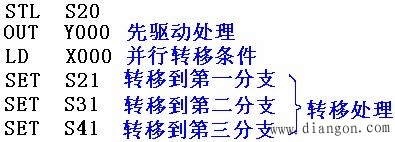
1.选择性分支的编程
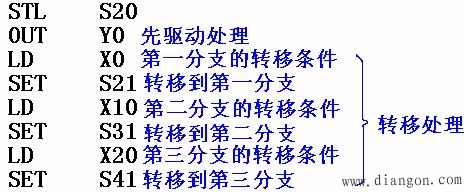
选择性分支的编程与一般状态的编程一样,先进行驱动处理,然后进行转移处理,所有的转移处理按顺序执行,简称先驱动后转移。因此,首先对S20进行驱动处理(OUT Y0),然后按S21、S31、S41的顺序进行转移处理。选择性分支的程序如下:
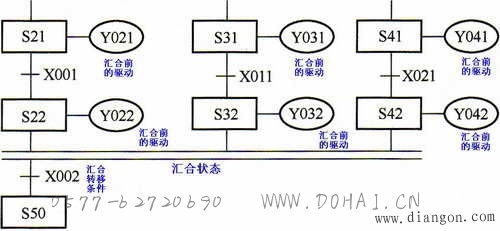
2.选择性汇合的编程
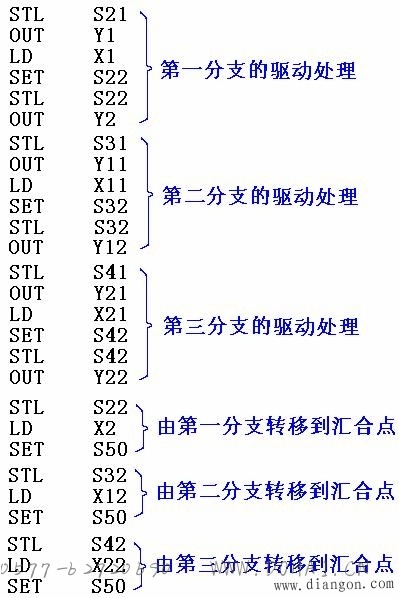
选择性汇合的编程是先进行汇合前状态的驱动处理,然后按顺序向汇合状态进行转移处理。因此,首先对第一分支(S21、S22)、第二分支(S31、S32)、第三分支(S41、S42)进行驱动处理,然后按S22、S32、S42的顺序向S50转移。选择性汇合的程序如下:
(三)编程实例
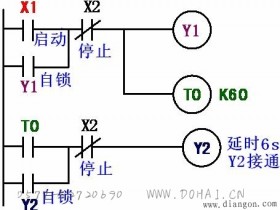
例1 用步进指令设计电动机正反转的控制程序。
控制要求为:按正转起动按钮SBl,电动机正转,按停止按钮SB3,电动机停止;按反转起动按钮SB2,电动机反转,按停止按钮SB3,电动机停止;且热继电器具有保护功能。
(1)I/O分配
X0:停止按钮SB3(常开),Xl:正转起动按钮SBl,X2:反转起动按 钮SB2,
X3:热继电器FR(常开);Y1:正转接触器KMl, Y2:反转接触器KM2。
(2)状态转移图
根据控制要求,电动机的正反转控制是一个具有两个分支的选择性流程.
分支转移的条件是正转起动按钮SBl(Xl)和反转起动按钮SB2(X2).
汇合的条件是热继电器FR(X3)或停止按钮SB3(X0).
初始状态S0可由初始脉冲M8002来驱动,其状态转移图如图7-13(a)所示。
(3)指令表
根据下图(a)所示的状态转移图,其指令表如下图(b)所示。
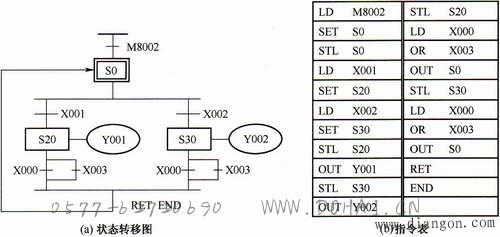
电动机正反转控制的状态转移图和指令表
例2 用步进指令设计一个将大、小球分类选择传送装置的控制程序
控制要求如下:如下图(a)所示,左上为原点,机械臂下降(当碰铁压着的是大球时,机械臂未达到下限,限位开关SQ2不动作,而压着的是小球时,机械臂达到下限,SQ2动作,这样可判断是大球还是小球)。然后机械臂将球吸住,机械臂上升,上升至SQ3动作,再右行到SQ5(若是大球)或SQ4(若是小球)动作,机械臂下降,下降至SQ2动作,将球释放,再上升至SQ3动作,然后左移至SQ1动作到原点。
Y4:左移 Y3:右移 Y2:上升 Y0:下降 Y1:吸球
(1)I/O分配
X0:启动按钮,Xl:SQ1(左限位开关), X2:SQ2(下限位开关),X3:SQ3(上限位开关),X4:SQ4(右限位开关),X5:SQ5(右限位开关);
Y0:下降,Y1:吸球,Y2:上升,Y3:右移,Y4:左移
(2)状态转移图
根据工艺要求,该控制流程根据吸住的是大球还是小球有两个分支,且属于选择性分支。分支在机械臂下降之后根据下限开关SQ2的是否动作可判断是大球还是小球,分别将球吸住、上升、右行到SQ4(小球位置X004动作)或SQ5(大球位置X005动作)处下降,然后再释放、上升、左移到原点。
其状态转移图如下图(b)所示。在下图(b)中有两个分支,若吸住的是小球,则X002为ON,执行左侧流程;若为大球,X002为OFF,执行右侧流程。
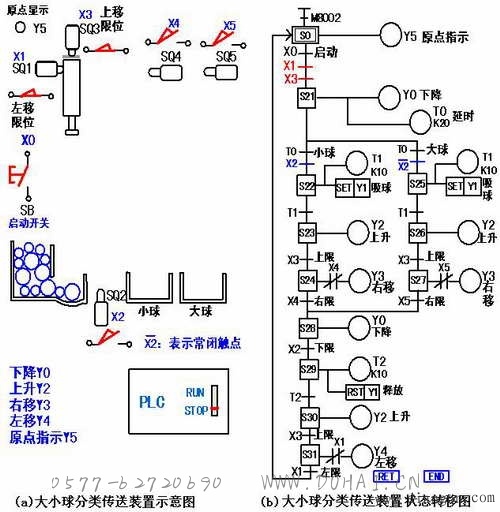
大、小球分类选择传送装置的示意图和状态转移图
二、 并行性流程及其编程
(一)并行性流程程序的特点
由两个及以上的分支程序组成的,但必须同时执行各分支的程序,称为并行性流程程序。下图是具有3个支路的并行性流程程序,其特点如下:
并行性流程程序的结构形式
(二)并行性流程编程
编程原则:先集中进行并行分支处理,然后再集中进行汇合处理。
1.并行性分支的编程
并行性分支的编程与选择性分支的编程一样,先进行驱动处理,然后进行转移处理,所有的转移处理按顺序执行。根据并行性分支的编程方法,首先对S20进行驱动处理 (OUT Y0),然后按第一分支、第二分支、第三分支的顺序进行转移处理。如图(a)所示,并行性分支的程序如下:

(a) 分支状态
(b)并行分支状态程 序
并行性分支的编程
2.并行性汇合的编程
并行性汇合的编程与选择性汇合的编程一样,也是先进行汇合前状态的驱动处理,然后按顺序向汇合状态进行转移处理。根据并行性汇合的编程方法,首先对S21、S22、S31、S32、S41、S42进行驱动处理,然后按S22、S32、S42的顺序向S50转移。如下图所示,并行性汇合的程序如下:
(a) 汇合状态

(b) 并行汇合状态程序
并行汇合的编程
3.并行性流程编程注意事项
(1)并行性流程的汇合最多能实现8个流程的汇合。
(2)在并行分支、汇合流程中,不允许有下图(a)的转移条件,而必须将其转化为图6-19(b)后,再进行编程。
(a)不正确的转移条件 (b) 正确的转移条件
并行性分支、汇合流程的转化
(三)编程实例
用步进指令设计一个按钮式人行横道交通灯控制的控制程序。
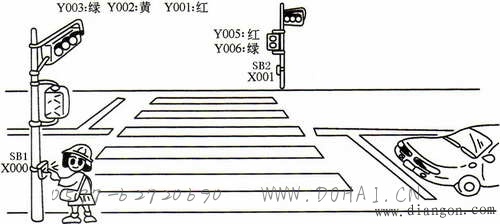
控制要求:如 下图所示人行横道交通灯控制,按下按钮SB1或SB2,人行道和车道指示灯按如 下图所示的示意图亮灯。
人行横道交通灯控制
(1)I/O分配
X0:SB1(左起动),Xl:SB2(右起动),Y1:车道红灯,Y2:车道黄灯,Y3:车道绿灯,Y5:人行道红灯,Y6:人行道绿灯。
(2)PLC的外部接线图(如下图所示)
按钮式人行横道指示灯的示意图
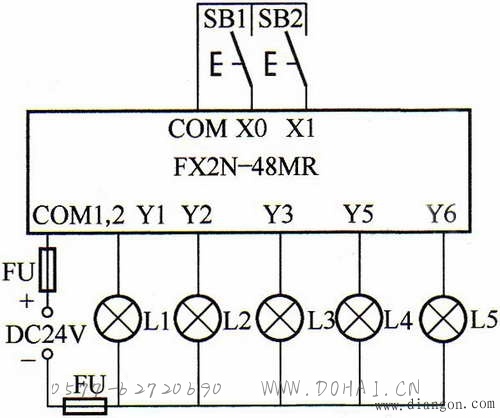
PLC的外部接线图
(3)状态转移图
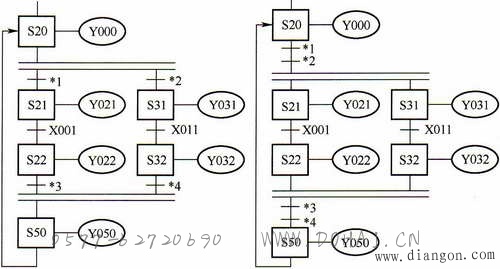
根据控制要求,当未按下按钮SB1或SB2时,人行道红灯和车道绿灯亮:当按下按钮SB1或SB2时,人行道指示灯和车道指示灯同时开始运行,是具有两个分支的并行流程。其状态转移图如 下图所示。
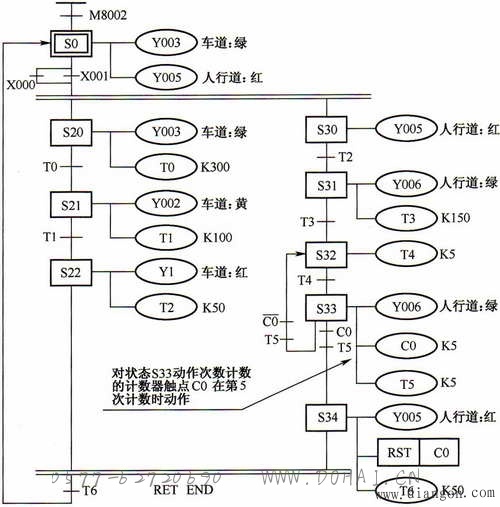
按钮式人行横道交通灯控制的状态转移图
说明:
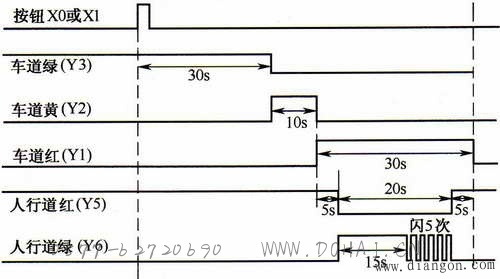
①PLC从STOP→RUN时,初始状态S0动作,车道信号为绿灯,人行道信号为红灯,
②按人行横道按钮SB1或SB2,则状态转移到S20和S30,车道为绿灯,人行道为红灯,
③30s后车道为黄灯,人行道仍为红灯。
④再过l0s后车道变为红灯,人行道仍为红灯,同时定时器T2起动,5s后T2触点接通,人行道变为绿灯。
⑤15s后人行道绿灯开始闪烁(S32人行道绿灯灭,S33人行道绿灯亮)。
⑥闪烁中S32、S33反复循环动作,计数器C0设定值为5,当循环达到5次时,C0常开触点就接通,动作状态向S34转移,人行道变为红灯,期间车道仍为红灯,5s后初始状态,完成一个周期的动作。
⑦在状态转移过程中,即使按动人行横道按钮SB1或SB2也无效。
(4)指令表程序
根据并行分支的编程方法,其指令表程序如下:

三、分支、汇合的组合流程及虚设状态
有些分支、汇合的组合流程不能直接编程,需要转换后才能进行编程,如下图,应将左图转换为可直接编程的右图形式。
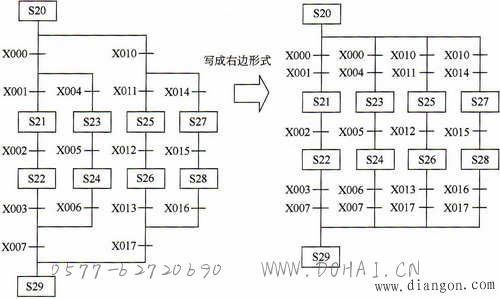
组合流程的转移
有一些分支、汇合组合的状态转图如下图所示,它们连续地直接从汇合线转移到下一个分支线,而没有中间状态。这样的流程组合既不能直接编程,又不能采用上述办法先转换后编程。这时需在汇合线到分支线之间插入一个状态,以使状态转移图与前边所提到的标准图形结构相同。但在实际工艺中这个状态并不存在,所以只能虚设,这种状态称为虚设状态。加入虚设状态之后的状态转换图就可以进行编程了 。
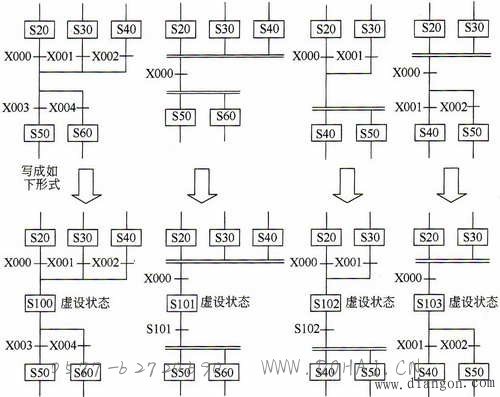
虚设状态的设置
- 营销微信
- 报单询价扫一扫
-

- 技术微信
- 技术问题扫一扫
-